Automatisert varetransport, og da spesielt transport av vogner, er innført i flere norske sykehus. AGV (Automated Guided Vehicle) og AMR (Autonom Mobil Robot) er de to mest omtalte typer industrielle mobile roboter for intern varetransport.
Den primære forskjellen mellom AGV og AMR er innen hvordan de navigerer og fleksibilitet, intelligens og kostnader[1]AGV vs AMR: 5 Key Differences to Overcome the Confusionshttps://novushitech.com/key-differences-agv-vs-amr/[2]AGV vs. AMR: What are the differences and advantages?https://standardbots.com/blog/agv-vs-amr. Se mer om AMR og materialhåndtering i Ph.d.-avhandlingen til Giuseppe Ismael FragapaneAutonomous material transportation in hospital intralogisticshttps://ntnuopen.ntnu.no/ntnu-xmlui/bitstream/handle/11250/2759743/Fragapane.pdf?sequence=3&isAllowed=y.
Det vil være ulike effekter ved innføring av automatisert vogntransport basert på omfanget av antall vogntransporter og transportavstander. I bygging av St. Olav Hospital tidlig på 2000-tallet ble det gjort en analyse og vurdering omkring lønnsomhet på innføring av automatisk vogntransport. En kartlegging av den manuelle transporten viste at tidsbruken var fordelt med ca. 25% til transport i kulvert, ca. 60% til transport i heis og ca. 15% til transport internt i etasjene. Analysen viste også at AGV kunne erstatte manuell transport og redusere antall årsverk med ca. 90%. Mellom AGV-stasjonene i hver etasje i de forskjellige sentrene og avdelingslagrene ble det lagt til grunn manuell transport. I tillegg ble det ansett å ha en betydelig positiv innvirkning på HMS med mindre tungt arbeid. For SNR Hjelset på ca. 60.000 m2 viset kost- nytteberegningen at innføring av AGV var lønnsomt. For UNN Narvik på ca. 30.000 m2 ble det ikke valgt AGV. En viktig grunn var organisering av forsyningsoppgaver, hvor forsyningspersonell både utfører arbeidsoppgaver i forsyningsfunksjoner, transporterer varer ut avdelingene og legger varene på plass i avdelingslager.
I figuren nedenfor er det eksempler på forskjellige typer AMR’er. Det finnes en rekke forskjellige produsenter og leverandører i det globale markedet. Trenden er at andelen AMR’er øker på bekostning av AGV’er. Det forventes en ytterligere økning i markedet for AMR.

Valget mellom AGV og AMR for interntransport i sykehus avhenger av flere faktorer. Her er noen viktige forskjeller og fordeler med hver teknologi:
AGV (Automated Guided Vehicles)
- Navigasjon: AGV-er følger faste ruter ved hjelp av ledninger, magnetstriper, laser (og plantegning) eller optiske markører. Noe mer utfordringer med å tilpasse seg fysiske ombygginger.
- Kostnad: Ofte lavere anskaffelseskostnader, men krever investering i infrastruktur som ledninger og markører.
- Pålitelighet: Meget pålitelige i miljøer med få hindringer og faste ruter.
- Sikkerhet: Stopper når de møter hindringer og venter til hindringen er fjernet.
AMR (Autonomous Mobile Robots)
- Navigasjon: AMR-er navigerer autonomt ved hjelp av kart (plantegning) og sensorer, og kan tilpasse ruten i sanntid.
- Fleksibilitet: Enklere å designe og endre kjøreruter, noe som gjør dem mer fleksible og enklere å skalere.
- Sikkerhet: Kan navigere rundt hindringer og fortsette leveransen uten avbrudd.
- Installasjon: Raskere og enklere å installere og med lavere krav til det fysiske miljøet enn AGV-er.
Sammenligning av AGV og AMR#
For sykehus, hvor miljøet ofte er dynamisk med mange mennesker og uforutsigbare hindringer, vil AMR-er kunne gi en større fleksibilitet og tilpasse seg endringer i miljøet uten behov for større endringer i styringssystemet[3]AMRs and AGVs: Two Automated Guided Vehicle Systems, Comparedhttps://www.knapp.com/en/insights/blog/differences-between-agv-amr/[4]AGV versus AMR Automation through driverless transport vehicles in material handling systemshttps://howtorobot.com/sites/default/files/2023-07/Whitepaper%20AGV%20versus%20AMR.pdf[5]AGVs vs. AMRs: What’s the Difference?https://aethon.com/agv-vs-amr-whats-the-difference/. Det bør gjøres kost- nytte vurderinger omkring valg.
AMR har forbedringer i teknologi sammenlignet med AGV, blant annet forbedringer i teknologi for posisjonering og navigering. AMR er i så måte mer selvgående da den har mulighet til å navigere rundt eventuelle hindringer i kjøretraseen. I tillegg er det mulighet for å ha AMR’er av ulik størrelse til transport av vogner av ulik størrelse og med ulike funksjoner som AGV’en ikke har mulighet for. Småpakkelogistikk er en mulighet med AMR hvor vognen kan tilpasses behovet, f.eks. transport av legemidler, blod ol. Teknologien til AMR er utprøvd i industrien og i danske sykehus, eksempelvis ved Sønderborg sygehus for leveranser av kjemoterapikurer.
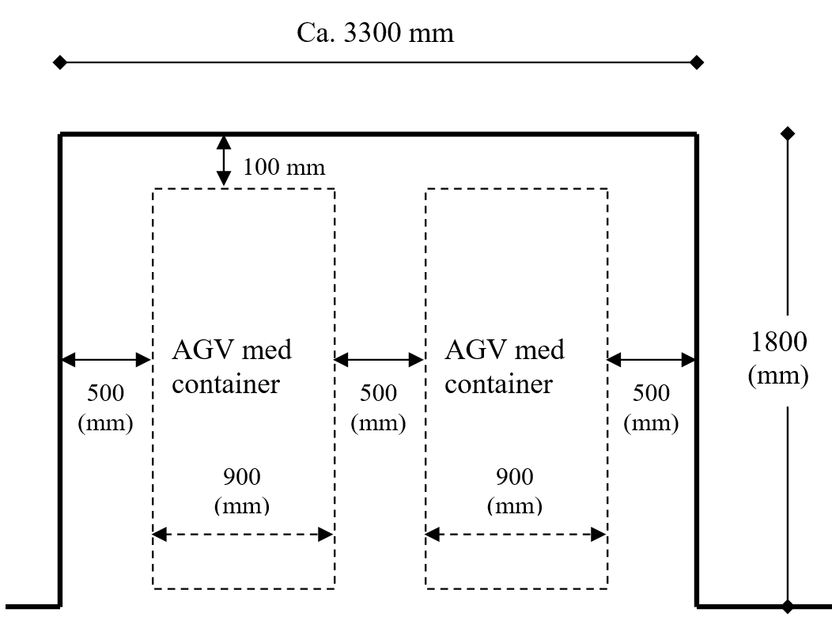
AMR-er og AGV-er leverer vogner med varer til en stasjon (eller flytareal), og vogner som skal tilbake til vare- og distribusjonssentralen (VDS) eller andre forsyningsenheter internt i sykehuset. På stasjonen står det tomme eller fulle transportvogner og venter på å bli hentet. Stasjoner planlegges vanligvis i hvert plan i tilknytning til heisgruppene i byggene. Det må sikres tilstrekkelig manøvreringsareal i tilknytning til stasjonene.
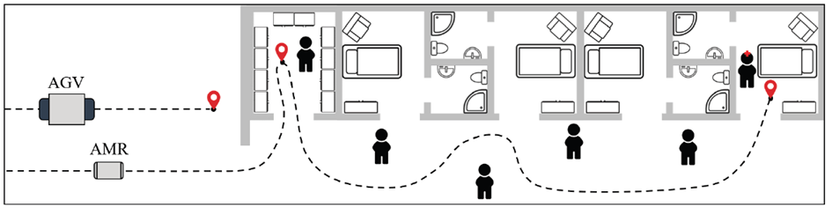
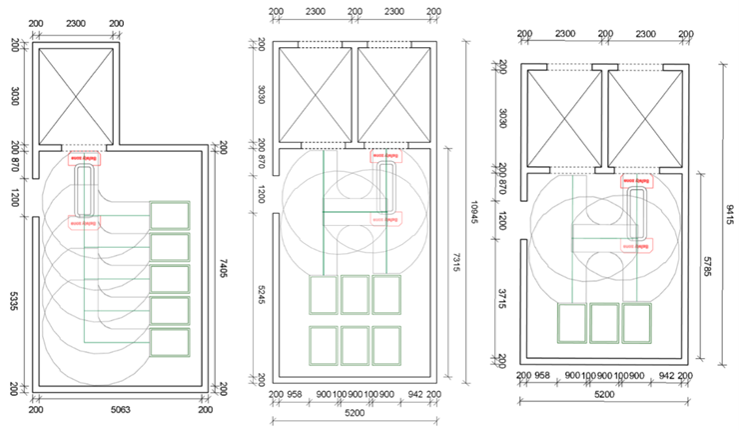
Plassering av AMR/AGV-stasjoner på avdelingsnivå kan ha ulike løsninger. I figuren nedenfor vises eksempler på AMR/AGV-stasjoner i tilknytning til heis, med utkjøring i et eget rom. AMR/AGV-stasjoner blir da ikke synlig for den aktiviteten som foregår på avdelingsnivå.
Bildet nedenfor viser eksempel på AGV-stasjon på St. Olavs hospital. Her kjører AGV ut av heis, og kjører i korridorområde til AGV-stasjon i nærheten av heis. Bak AGV-stasjon er det arealer for oppstilling av vogner.

Bildet nedenfor viser eksempel på AGV-stasjoner i sengeområde på Østfoldsykehuset Kalnes. Her kjører AGV ut av heis, over korridor som benyttes til manøvrering, og til AGV-stasjoner i nisje. I tillegg til AGV-stasjon er det oppstillingsplass til vogner i nisjen.

Det er behov for AMR/AGV-stasjoner i tilknytning til vare- og distribusjonsterminal, avfallssentral og andre forsyningsfunksjoner som sterilsentral, sykehusapotek, hovedkjøkken, farmasitun, personalgarderober mv. En samlokalisering av forsyningsfunksjoner legger til rette for felles utnyttelse av AMR/AGV-stasjoner, og kan bidra til bedre utnyttelse av stasjoner og anlegget. Det legger også til rette for ”sentralisering” av ladestasjoner.
Det er ulike løsninger for hente- og leveringsstasjoner. Den ene løsningen er conveyer-baner hvor det settes på flere vogner på banen (kø), og hvor AGV-er eller AMR-er henter vognene i enden av banen. Tilsvarende ved retur av vogner, hvor AGV-er eller AMR-er leverer i enden av banen, med akkumulering av vogner på banen. Østfoldsykehuset Kalnes har en løsning med conveyer-baner for levering og mottak av AGV-vogner i varemottaket, se figuren nedenfor.

Den andre løsningen er flere hente- leveringsstasjoner ved siden av hverandre, og da plassert i enden av varemottaket i tilknytning til kulvert. St. Olavs hospital har en slik løsning, se figuren nedenfor.

Det vil også være behov for ladestasjoner for AMR-er AGV-er. Disse kan med fordel lokaliseres i tilknytning til vare- og distribusjonssentral som det mest trafikkerte området. Ved behov for desentrale ladestasjoner, plasseres disse typisk i kulvert. Antall AMR- og/eller AGV-stasjoner og ladestasjoner verifiseres vanligvis i forprosjektet. Simulering av interntransport med AGV eller AMR bør gjennomføres for å dimensjonere antall AGV-er/AMR-er, antall hente- og leveringsstasjoner og antall ladestasjoner. Transportmengder og transportavstander er de viktigste faktorene for å dimensjonere anlegget.
AMR/AGV transportene anbefales å foregå så adskilt fra pasientvirksomhet som mulig, men det finnes også erfaringer fra andre sykehus hvor AMR beveger seg i avdelinger med pasienter. Integrasjon med tekniske installasjoner som heis, dørmiljø, brannalarmsystem og trådløst nettverk er nødvendig for AGV-/AMR-ens kjøretrasé.
Automatisert varetransport vs manuell varetransport?#
Vurdering av automatisert varetransport for vogner sammenlignet med manuell transport av vogner bør gjøres basert på kost-nyttevurdering hvor både kvantitative og kvalitative faktorer legges til grunn. Lønnsomheten av en automatisert varetransport er først og fremst avhengig av transportavstander i sykehuset (dvs. størrelsen på sykehuset) og antall vogntransporter. Det kan nevnes at for Sykehuset Nordmøre og Romsdal på Hjelset, som er på ca. 60.000 m2, viste beregningen en positiv kost-nytte. De større sykehusprosjektene de senere årene har eller planlegger med automatisert varetransport for vogner, som f.eks. Akershus Universitetssykehus, Sykehuset Kalnes Østfold, Nye Drammen Sykehus, Drammen, Oslo Universitetssykehus Aker og Rikshospitalet og St. Olavs Hospital.
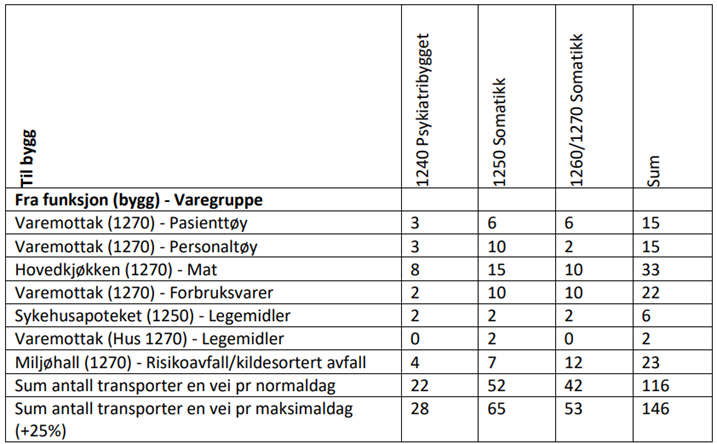
I prosjekter med AFV/AMR transport av vogner er det behov for å utarbeide en transportanalyse hvor omfanget av varetransporter og transportavstander til/fra forsyningsfunksjoner og bygningsdeler/etasjer/avdelinger kartlegges. I tillegg må daglig driftstid for automatisert varetransport avklares, som både har betydning for antall roboter og bemanningsbehov. Tabellen nedenfor er et eksempel på dette:
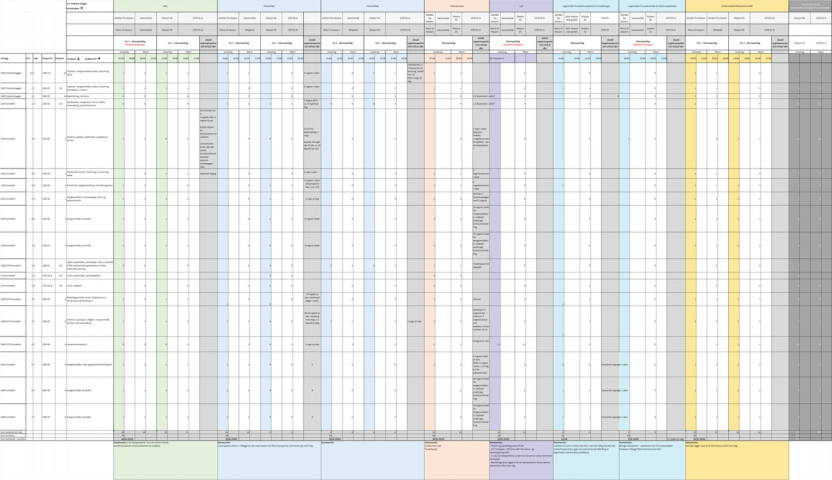
For prosjekter som innfører AGV/AMR vil det vanligvis i forbindelse med optimalisering av design og verifikasjon av anleggets kapasitet være behov for å utarbeide en detaljert transportplan, med mer detaljert oversikt over tidsintervall for de aktuelle ulike transportene (f.eks. forbruksvarer, tøy, mat, sterilgods, avfall, legemidler osv.). Det bør legges til rette for en mest mulig balansert transportplan, uten for store «topper» i enkelte tidsintervall. Omfanget av transporter, driftstiden og balansen i planen har påvirkning på hvor mange AGV/AMR det er behov for. En detaljert transportplan kan være grunnlaget for en simulering som gjennomføres, som bidrag til å beslutte et endelig design og kapasitet av anlegget. Den detaljerte transportplanen vil være grunnlaget for den transportplanen som må legges inn i anleggets styringssystem. Tabellen nedenfor er et eksempel på en detaljert transportplan.
Referanser
- Aethon (2018). AGVs vs. AMRs: What’s the Difference?. https://aethon.com/agv-vs-amr-whats-the-difference/
- CSi palletising (2021). AGV versus AMR Automation through driverless transport vehicles in material handling systems. https://howtorobot.com/sites/default/files/2023-07/Whitepaper%20AGV%20versus%20AMR.pdf
- Giuseppe Ismael Fragapane (2021). Autonomous material transportation in hospital intralogistics. https://ntnuopen.ntnu.no/ntnu-xmlui/bitstream/handle/11250/2759743/Fragapane.pdf?sequence=3&isAllowed=y
- Knapp (2023). AMRs and AGVs: Two Automated Guided Vehicle Systems, Compared. https://www.knapp.com/en/insights/blog/differences-between-agv-amr/
- Novus Hi-Tech (2026). AGV vs AMR: 5 Key Differences to Overcome the Confusions. https://novushitech.com/key-differences-agv-vs-amr/
- Standard Bots (2025). AGV vs. AMR: What are the differences and advantages?. https://standardbots.com/blog/agv-vs-amr